Интересный эксперимент: один танк стреляет ракетой, а второй ведёт её на цель

Как известно, танки могут вести огонь с закрытых позиций, поражая противника осколочно-фугасными снарядами без нужды наблюдать его в прицел. А можно ли провернуть подобное, стреляя управляемыми ракетами?
На отечественных (советских) танках — нельзя, поскольку их ракеты не обладают головками самонаведения и системами автоматического поиска целей.
Однако радиокомандные комплексы управляемого вооружения, устанавливавшиеся на танки типа Т-64 и Т-80, после соответствующей доработки позволяли схитрить в этом деле.«Мухлёж» заключается в том, что танк, находясь на закрытой позиции, мог запустить ракету, а второй танк, расположенный ближе к противнику и будучи замаскированным (не раскрывая своего местоположения врагу), перехватывал управление и доводил её до цели.
Эксперименты показали, что замысел вполне жизнеспособный, а результаты были опубликованы во многих научных изданиях СССР. Публикуем в полном объёме их и мы, ведь, несмотря на то, что радиокомандные КУВ в России уже не используются, идея эта довольно интересная, если и не в практическом, то в техническом плане уж точно.
Возможность пуска ракет из танка с закрытых позиций
Одним из средств защиты танка является повышение скрытности применения собственного оружия. При всех средствах маскировки выстрел может быть зафиксирован оптическими, оптико-электронными и акустическими средствами наблюдения. При этом танк будет атакован через 5–15 секунд после первого выстрела.
Более безопасна стрельба из танка с закрытых позиций. С этой целью разработана экспериментальная система последовательного наведения двумя комплексами управляемой ракеты, выстреливаемой из танковой пушки. Процесс последовательного наведения имеет два этапа:
1) введение ракеты в поле управления комплекса, который обеспечит ее наведение на цель;
2) наведение ракеты на цель.
Такое наведение удобно с помощью комплекса, использующего командные системы управления, имеющего средства для определения положения ракеты и передачи ей команд наведения. Этим условиям отвечают комплексы управляемого вооружения (КУВ) 9К112-1. В его состав входят:
-Следящий координатор, осуществляющий поиск, захват и автоматическое сопровождение источника света на ракете с измерением ее угловых координат относительно линии визирования прицела и формированием команды «Захват»;
-Вычислитель;
-Радиопередающая аппаратура.
На борту ракеты имеются радиоприемная аппаратура и исполнительное устройство в виде рулей. Грубый контур управления обеспечивает выведение ракеты на линию визирования прицела, точный осуществляет ее наведение на цель.
Комплекс имеет аппаратуру пуска ракет, а также систему связи с прицельным комплексом и стабилизатором вооружения.
Итак, наличие в танковой аппаратуре КУВ 9К112-1 информации о пуске ракеты и нахождение ее в поле зрения координатора позволяет использовать аппаратные средства командного телеуправления для построения экспериментальной системы последовательного наведения двумя комплексами. При этом необходимо решить следующие задачи:
- выстреливание ракеты в поле зрения координатора II комплекса, которому передается управление;
- обеспечение точности и устойчивости контура управления II комплекса;
- исключение возможности подачи на ракет команд одновременно с обоих комплексов.
При решении первой задачи учитывался характер местности и определялись секторы возможного применения экспериментальной системы. По уточненному положению цели и танков производились расчеты оптимальной траектории ракеты и начальных установок стрельбы.
Для формирования команд управления аппаратура КУВ осуществляет преобразование угловых координат ракеты относительно линии визирования в линейные: угловые координаты перемножаются на дальность до ракеты. Эта дальность задается в программе, поэтому пуск соответствующего блока II комплекса производится во время движения ракеты через точку В (рис. 1). Точка В определяется из условия максимального соответствия программной и действительной дальности на участке С-S траекторий полета, где точка С соответствует предполагаемому началу управления ракетой II комплексом.
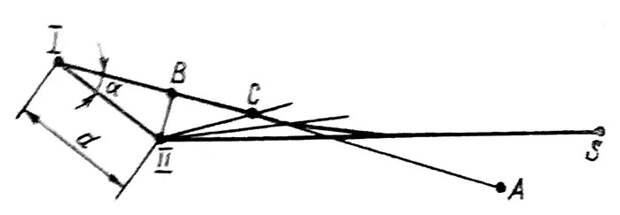
Рис. 1. Схема управления: I, II – первый и второй КУВ; А – ориентир: В, С – точки траектория; S – цель (остальные обозначения см. в тексте)
Время подлета ракеты определялось по формуле:
t = (d cos α)/vp (1)
Где d – расстояние между I и II КУВ; α – угол между линией стрельбы и направлением на II КУВ; v – средняя скорость ракеты на участке траектории полета от точки старта до точки В.
Исключение команд управления одновременно с двух комплексов обеспечивается в системе мультиплексированием радиолинии. Передача управления осуществляется по инициативе II КУВ, когда ракета находится в поле зрения его координатора, что обеспечивает непрерывность работы системы и не допускает возникновения конфликтных ситуаций.
Применение современных схемотехнических решений позволяет ввести дополнительный блок без доработок серийных систем. Предполагаемая схема (рис. 2) обеспечивает гальваническую развязку кабельной линии связи с аппаратурой обоих КУВ. При выключении этих дополнительных блоков можно производить пуски ракет независимо друг от друга. Наличие в системе цветовой индикации позволяет наглядно контролировать процесс наведения ракет операторами обоих комплексов, что уменьшает информационную нагрузку на экипажи.
Траектория полета ракеты и взаимное расположение огневых позиций танков и цели на первом этапе испытаний представлены на рис. 3. Из условий безопасности был выбран «штатный» режим пуска с достаточно большим начальным углом возвышения пушки и оси координатора относительно линии прицеливания с последующим (программным) опусканием оси координатора и выведением ракеты на линию визирования прицела, второй комплекс работает в режиме, обеспечивающем постоянное совмещение оси координатора и линии визирования прицела.
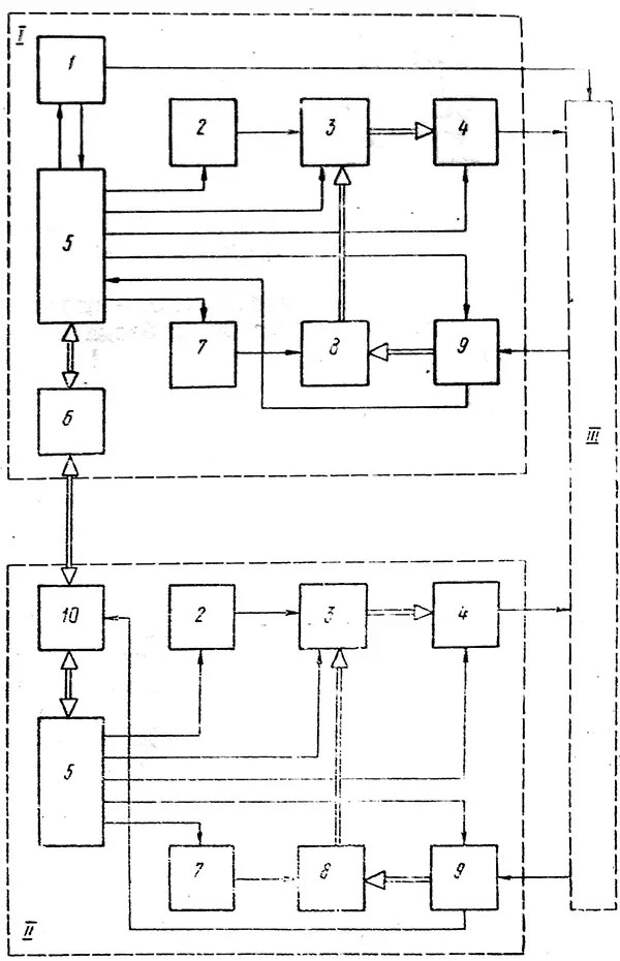
Рис. 2. Система последовательного наведения двумя КУВ: I, II – первый и второй КУВ; III – ракета; 1 – пусковая установка (пушка); 2 – блок формирования программных команд; 3 – синтезатор команд; 4 – кодирующее устройство и передатчик; 5 – блок управления КУВ; 6, 10 – дополнительные блоки; 7 – блок программной дальности; 8 – схема перемножения; 9 – координатор
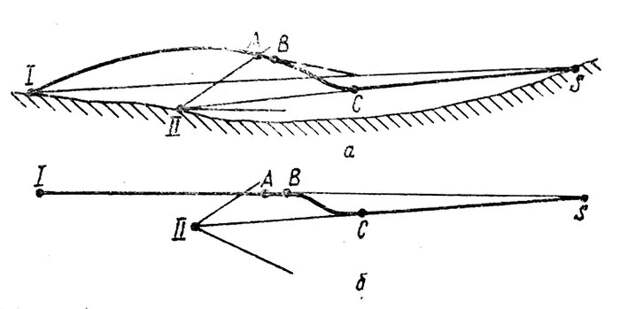
Рис. 3. Схема расположения танков № 1 к № 2 к траектория полета ракеты: а – вид сбоку; б – вид сверху; А – точка входа ракеты в поле зрения координатора II КУВ; В – начало управления II КУВ; С – точка вывода ракеты на линию визирования II КУВ; S – цель
Наводчики обоих танков наводили марки прицелов на одну цель, затем наводчик танка № 1 производил пуск ракеты. При этом в соответствии с алгоритмом работы контура управления комплекса танка № 1 обеспечивает выведение ракеты на линию визирования прицела этого танка с последующим ее наведением на цель.
В определенный момент времени (точка А) ракета входит в поле зрения координатора комплекса № 2, который после этого ее захватывает (точка В), что обеспечивает возвращение в исходное состояние аппаратуры КУВ танка № 1 с прекращением подачи радиокоманд, включение контура II КУВ и выведение ракеты на линию визирования прицела танка № 2 (точка С). После поражения цели аппаратура КУВ танка № 2 возвращается в исходное состояние.
Действия наводчиков отличались от «штатной» работы включением дополнительного блока и введением задержки времени по формуле (1). При стрельбе каждый из наводчиков удерживает марку на цели, все операции наведения выполняются автоматически.
Второй этап испытаний (рис. 4) проводился в ходе войсковых тактических учений на территории Белоруссии. При атаке цели ближней группы производился пуск ракеты танка № 1 с последующим наведением ее комплексом танка № 2, а при атаке цели дальней группы – из танка № 1' с последующим наведением комплексом танка № 2.
Особенность экспериментальных стрельб на этом этапе испытаний заключалась в том, что наводчики танков № 1 и № 1' целей не наблюдали (стрельба с закрытой позиции), а ориентиром служил впереди стоящий танк № 2. Для обеспечения безопасности линия визирования стреляющего танка находилась выше среза башни с отклонением по горизонту от впереди стоящего танка на угол, заранее определяемый в зависимости от направления на выбранную цель. В этих условиях траектория ракеты проходит выше поля управления танка № 2. Поэтому танк № 2 работал в режиме начального угла возвышения координатора и последующего совмещения его с линией визирования. При этом контур управления выводит ракету на линию визирования стреляющего танка № 1 (или № 1') с последующим захватом координатором танка № 2 (точка А). В точке В включается КУВ танка № 2, ось координатора по специальной программе опускается на линию визирования цели (точка С). Действия наводчиков сводятся к удержанию марки прицела стреляющего танка на ориентире, а марки прицела наводящего танка – на цели.
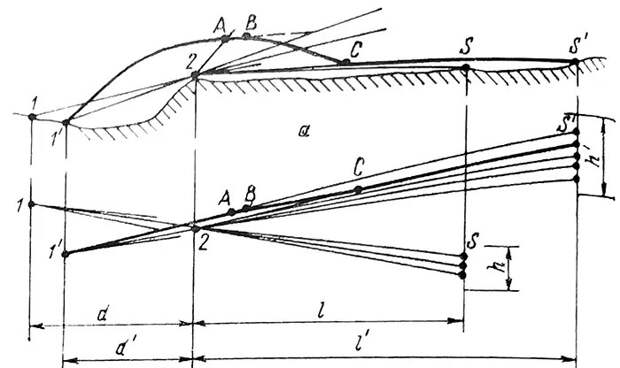
Рис. 4. Схема испытаний: а – вид сбоку; б – вид сверху; 1, 1' – танки № 1 и 1' для поражения целей ближней и дальней группы; 2 – танк № 2; А – точка входа ракеты в поле зрения координатора II КУВ; В – начало управления ракеты II комплексом; С – точка вывода ракеты на линию визирования II КУВ; S (S') – цель; d = 560, d = 530 м – расстояния между танками № 1 и № 2, № 1' и № 2; l ≈ 2 000 и l' ≈ 4 000 м – расстояние между танком № 2 и целью соответственно из ближней и дальней группы; h ≈ 200 и h' ≈ 400 м – ширина по фронту ближней и дальней группы целей
Экспериментальные пуски ракеты подтвердили работоспособность рассматриваемой системы. Из 14 пусков по дальней группе целей получено 12 попаданий при двух промахах. Применение средств ориентирования и топопривязки танков в сочетании с использованием современной вычислительной техники позволит полностью автоматизировать выработку исходных установок для выстрела в поле зрения второго координатора.
Вывод: исследования показали возможность пуска управляемых ракет из танка с закрытых позиций, что обеспечивает необходимую скрытность собственного выстрела.
Источник:
В. П. Гопин, А. Ф. Чубарь, А. С. Карусевич и др. Возможность пуска ракет из танка с закрытых позиций / В. П. Гопин, А. Ф. Чубарь, А. С. Карусевич и др. // Вестник бронетанковой техники. – 1990. – № 10.
Свежие комментарии